
Projektowanie wału ze względu na kryterium wytrzymałościowe
Moment wypadkowy gnący w dwóch płaszczyznach XY, XZ przecinających się w osi geometrycznej wału


W przypadku obciążeń zmiennych nie można stosować hipotezy wytężeniowej Hubera, z uwagi na to, iż wał się obraca – często z wysoką prędkością – stąd też obciążenie jest zmienne

Wzór przekształcający hipotezę Hublera, uwzględniający zmienne obciążenie wału gdzie:
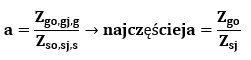
Gdzie :
Zg – trwała wytrzymałość zmęczeniowa przy zginaniu
Zgo – z obracającym się wektorem obciążenia
Zgj – z jednostronnym wektorem obciążenia
Zs – trwała wytrzymałość zmęczeniowa przy skręcaniu
Zso – z obracającym się wektorem obciążenia
Zsj – z jednostronnym wektorem obciążenia
Istotny stosunek długości wału do średnicy:
 |
nie liczymy τt z uwagi na zbyt mały udział |
Współczynnik redukcyjny dla obciążeń statycznych:
-tabela współczynników redukcyjnych
| dla obciążeń statycznych → | 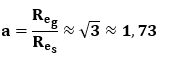 |
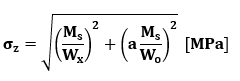
Zasady redukowania do momentu zastępczego :
W przypadku dominacji momentu gnącego Mg

W przypadku dominacji momentu skręcającego Ms

Wały obciążone tylko momentem skręcającym obliczamy z warunku

Uzależniając obliczenia od przenoszonej mocy N i prędkości obrotowej wału n.
